
Comanda vectorială a maşinii asincrone
4. Aspecte ale implementării controlului vectorial
4.1 Achiziţia curenţilor
Comanda vectorială necesităîn mod esenţial curenţii statorici pentru sistemul de referinţă (a,b,c). ia şi ib sunt măsuraţi utilizând traductoare cu efect Hall - Fig.5.
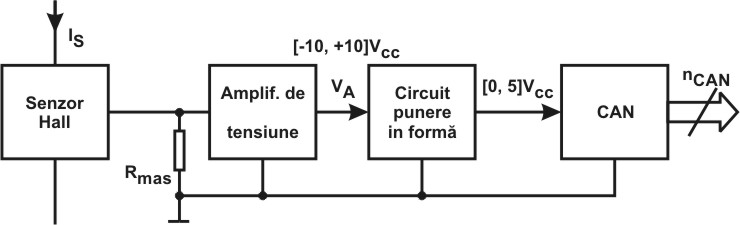
Fig. 5 Achiziţia curenţilor statorici - structura standard
Obţinerea fluxului (amplitudine şi fază) este diferită:
4.2 Regulatoarele PI
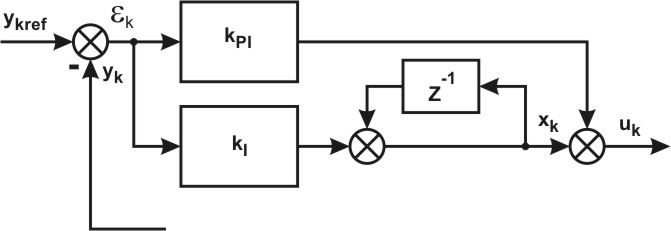
Regulatoarele PI numerice sunt adecvate pentru controlul cuplului şi fluxului în condiţiile unei acordări bune pentru parametrii termenilor P(kP) şi I (kI).
Primul termen (efect) este legat de sensibilitatea la eroare, în timp ce al doilea priveşte eroarea în regim staţionar. Regulatorul PI este implementat prin relaţiile de calcul on-line (Fig. 6):
|
; xk :variable auxiliare | (13) |
În timpul funcţionării:
® pot provoca saturaţia regulatorului.
![]() Comportamentul neliniar este legat de fenomene tranzitorii supărătoare.
Comportamentul neliniar este legat de fenomene tranzitorii supărătoare.
![]() Pentru a le evita, componenta integrală este modificată:
Pentru a le evita, componenta integrală este modificată:
ulk = uk Si uk > umax, ulk = umax Si uk < umin, ulk = umin |
(14) |
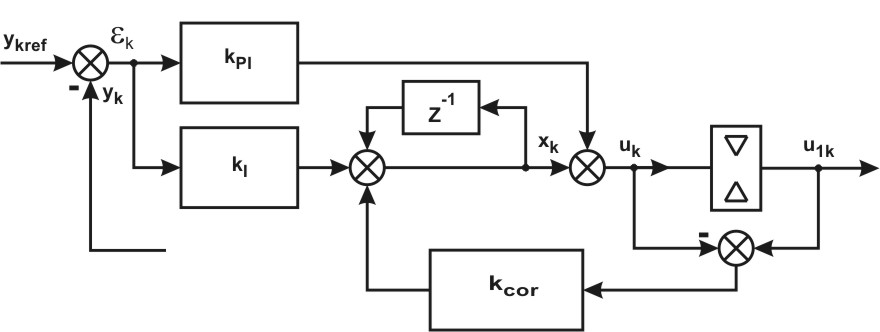
Fig. 7 Regulator PI numeric cu anti-saturaţie