
Pornirea pe caracteristici reostatice este specifică acţionărilor cu motoare asincrone cu rotorul bobinat. Deşi metodele de pornire specifice motoarelor asincrone cu rotorul în scurtcircuit pot fi aplicate şi motoarelor asincrone cu rotorul bobinat, ele nu se utilizează practic, deoarece sunt însoţite de reducerea cuplului de pornire. Având în vedere creşterea cuplului de pornire cu creşterea impedanţei rotorice, pornirea motoarelor asincrone cu rotorul bobinat se realizează prin modificarea impedanţei pe fază a rotorului, care poate fi simetrică sau asimetrică.
Este cea mai raspândita metodă de pornire. Rezistenţele de pornire pot fi metalice (din fontă turnată, tablă silicoasă sau sârmă) sau cu lichid (soluţie de carbonat de sodiu, anhidru în apă distilată, etc.). Rezistenţele metalice sunt împărţite în mai multe trepte şi răcite cu aer, natural sau forţat, sau cu ulei, iar comanda de scurtcircuitare se realizează manual, cu controlere sau placă de ploturi, sau automat cu contactoare. Reostatele cu lichid sunt prevăzute cu instalaţii de omogenizare şi sisteme de răcire a soluţiei, comanda facându-se manual sau automat cu servomotor.
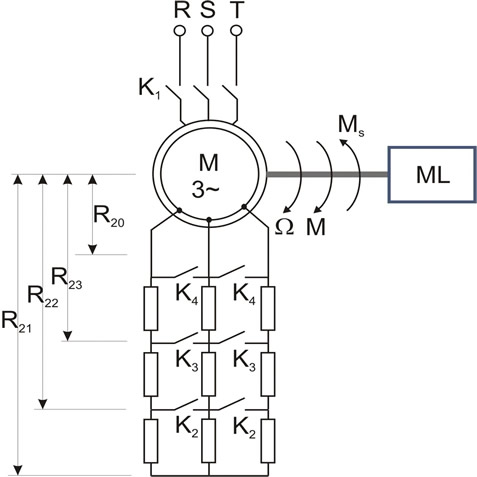
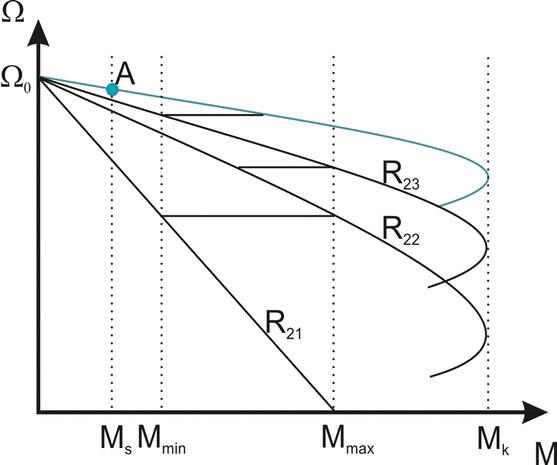
Considerând o acţionare cu motor asincron cu rotorul bobinat şi reostat cu trei trepte de rezistenţe, care sunt scoase din circuit prin scurtcircuitarea lor cu contactele K2, K3 şi K4 ale unor contactoare, se constată că alimentarea motorului cu tensiune se realizează prin închiderea contactelor de linie K1. Motorul porneşte pe caracteristica mecanică reostatică de rezistenţă R21 = r1 + r2 + r3 + R20 punctul de funcţionare deplasându-se de la punctul corespunzător cuplului Mmax, spre punctul corespunzător cuplului Mmin. La atingerea cuplului minim se scurtcircuitează prima treaptă de rezistenţă r1 prin închiderea contactelor K2 . Punctul de funcţionare se deplasează la viteză, respectiv alunecare, practic constantă pe următoarea caracteristică mecanică reostatică de rezistenţă R22 = r2 + r3 + R20 . Funcţionarea se desfăşoară similar până la închiderea contactelor K4, punctul de funcţionare deplasându-se pe caracteristica mecanică naturală până la intersecţia cu caracteristica statică a maşinii de lucru (punctul A). Rezultă că în timpul pornirii cuplul dezvoltat de motor se modifică între limitele Mmin şi Mmax, acceleraţia medie de pornire fiind aceeaşi pentru fiecare treaptă. Dacă cele două limite nu se conservă, se poate obţine o acceleraţie medie variabilă în trepte, putându-se aproxima astfel diagrame trapezoidale sau parabolice pentru acceleraţie.
Determinarea parametrilor pentru pornirea reostatică presupune:
a) determinarea numărului de trepte de pornire;
b) calcularea rezistenţelor de pornire;
c) calcularea rezistenţelor treptelor de pornire;
d) alegerea rezistoarelor şi conectarea lor serie-paralel pentru a obţine parametrii necesari pornirii: rezistenţă, curent admisibil;
e) calculul vitezelor corespunzătoare cuplului Mmin pentru comanda automată în funcţie de viteză;
f) calculul timpului de accelerare pe fiecare treaptă pentru comanda automată în funcţie de timp.