
În cazul maşinilor de lucru care dezvoltă cuplu static pasiv, frânarea contracurent se obţine prin schimbarea ordinii de succesiune a fazelor şi introducerea unei rezistenţe suplimentare în circuitul rotoric.
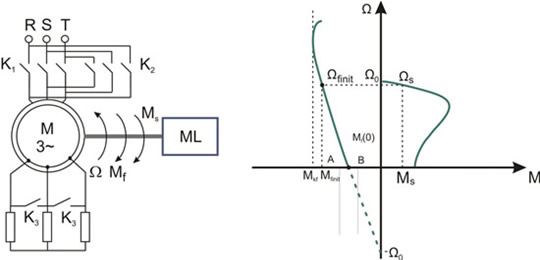
Principiul de determinare a rezistenţei de frânare R2f constă în particularizarea caracteristicii statice de frânare pentru punctul de coordonate ( Ωinitial , Mf initial)
Rezistenţa de frânare poate fi determinată şi din condiţia ca acţionarea să se oprească într-un interval de timp impus. Pentru aceasta se calculează
![]()
unde:
Δt=tf impus
Δω=Ωinitial-Ωfin
Într-un caz particular când Ωfin=0:
Δω=Ωinitial.
Se consideră că Mfmed este media geometrică între cuplul iniţial şi cel final
![]()
Se adoptă |Mf(0)|>|Ms| sau |Mf(0)|>|Ms(0)|,
![]()
În funcţie de valoarea lui Mf (0) şi valoarea cuplului static, pot să intervină în funcţionare următoarele două cazuri:
1.Mf(0) < Ms(0) (caracteristica A). Punctul de funcţionare se obţine pentru viteza 0, rotorul fiind calat.
2.Mf(0) > Ms(0) (caracteristica B), punctul de funcţionare ajunge în cadranul III. În cazul cuplurilor statice active frânarea contracurent se obţine prin introducerea unei rezistenţe suplimentare în circuitul rotoric şi inversarea sensului de rotaţie sub acţiunea cuplului static.
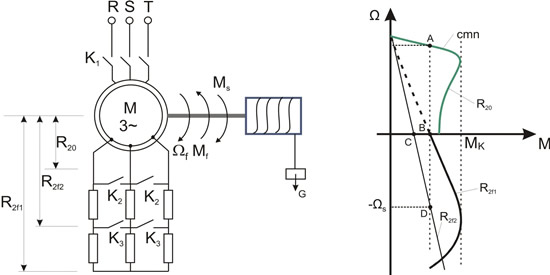
Punctul B corespunde cazului în care greutatea G este menţinută în echilibru la viteza zero, iar punctual D corespunde cazului în care greutatea G este coborâtă cu o viteza mică - ΩS, impusă de procesul tehnologic.
Parametrii necunoscuţi sunt rezistenţele R2f1 şi R2f2.
Principiul de determinare este acelaşi - se particularizează ecuaţia caracteristicii statice pentru:
- punctul B:
![]()
Rezultă alunecarea critică:
respectiv rezistenţa:
![]()
- punctul D:
![]()
Rezultă:
![]()